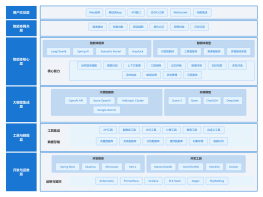
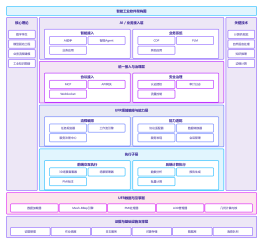
智能小车软件层架构
2015-12-13 21:45:53 34 举报智能小车软件层架构主要包括以下几个部分:感知层、决策层和控制层。感知层负责收集环境信息,包括摄像头、超声波传感器等设备的数据;决策层根据感知层提供的信息进行路径规划和避障策略的制定;控制层负责将决策层的指令转化为具体的控制信号,驱动电机和舵机等执行器完成动作。此外,智能小车还需要考虑电源管理、通信协议等方面的问题。总之,智能小车软件层架构是一个复杂的系统,需要综合考虑各种因素才能实现高效稳定的运行。
模板推荐
作者其他创作
大纲/内容






0 条评论
下一页