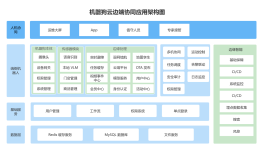
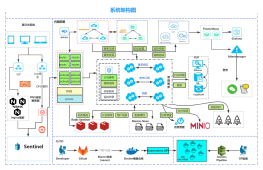
机器人地架构图
2016-06-06 11:18:13 0 举报机器人地架构图是一种用于描述机器人系统内部组件之间关系的图形表示。它通常包括以下几个主要部分:1. 传感器模块:负责收集外部环境信息,如图像、声音和距离等。2. 控制器:根据传感器数据制定决策并控制机器人的行为。3. 执行器:将控制器的指令转化为实际动作,如移动、抓取物体等。4. 电源模块:为机器人提供所需的电能。5. 通信模块:允许机器人与其他设备或人类进行交互。6. 软件平台:支持机器人运行的各种应用程序和服务。这些组件通过总线或其他通信机制相互连接,共同实现机器人的功能。
模板推荐
作者其他创作
大纲/内容






0 条评论
下一页