机器人自主定位与导航技术方案
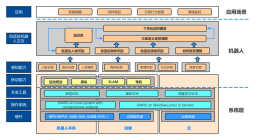
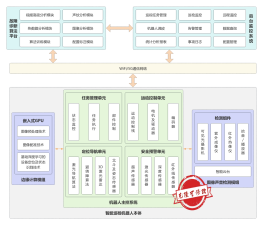
2017-01-17 02:50:28 0 举报机器人自主定位与导航技术方案是一种基于传感器和算法的智能系统,旨在使机器人能够在未知环境中自主地感知周围环境、建立地图并规划路径。该方案通常包括激光雷达、摄像头、超声波等多种传感器的组合,以及SLAM(Simultaneous Localization and Mapping)、A*等先进的算法。通过实时收集和处理数据,机器人能够实现精确的位置估计和路径规划,从而实现自主避障、目标追踪等功能。此外,该方案还需要考虑机器人的动力学特性、能耗优化等因素,以实现高效、稳定的运动控制。总之,机器人自主定位与导航技术方案是实现机器人智能化的关键基础之一,具有广泛的应用前景。
模板推荐
作者其他创作
大纲/内容






0 条评论
下一页