研究结论
自动驾驶数据闭环成熟,3D 生成实现商业化,XR 支撑具身智能发展,为世界模型构建奠定基础。
AI 应用现状
自动驾驶 L2 级落地,静态 3D 资产生成商业化,XR 成为具身智能数据采集核心工具。
自监督学习预训练 3D 模型,强化学习解决具身智能 Sim2Real 问题。
绪论
研究展望
2030 年前后实现精准世界模型,支撑虚拟 - 现实无缝交互与全局优化决策。
面临挑战
具身智能真机数据稀缺,3D 表征标准化不足,跨域模型泛化性差。
标准制定
统一 3D 数据表征格式,规范跨领域数据共享接口。
模型设计与实验
自动驾驶采用强化学习 + 合成数据,3D 生成测试 Mesh 与 NeRF 路线。
传统技术与流程
依赖人工标注 3D 数据,物理世界交互依赖规则引擎,跨领域数据孤立。
解决问题
优化结果对比
提出问题
AI 方案较传统,自动驾驶接管里程提升 2 倍,3D 生成精度达工业级。
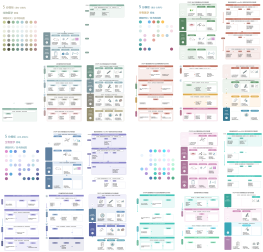
空间智能技术路线图
分析问题
研究方法与内容
现状分析
技术瓶颈
Sim2Real 迁移误差,边缘算力限制,数据闭环未形成。
数据与场景构建
聚焦数据闭环构建与多领域协同,攻克 “数据稀缺、表征复杂、场景落地差” 难题。
特斯拉车队日增千万英里数据,Meta 的 HOT3D 数据集含 33 种物体交互数据。
国内外研究现状
特斯拉 FSD 积累 30 亿英里驾驶数据,Meta 推动 3D 生成技术,具身智能处于早期探索。
案例分析
研究背景及意义
空间智能基于 3D 视觉实现理解、推理等功能,自动驾驶、3D 生成等领域需求迫切,但数据体系与跨域融合存在瓶颈。
相关算法
系统架构
“云端模型训练 + 边缘端实时交互” 协同,XR 设备加速数据采集。
算法优化
强化学习(自动驾驶长尾场景)、生成式模型(3D 内容创建)、联邦学习(数据隐私保护)。
相关技术
自动驾驶端到端大模型、3D 生成的 Mesh/NeRF 表征、具身智能的多模态感知。
隐私保护
空间智能核心理论
联邦学习处理医疗、工业等敏感 3D 数据,保障数据安全。
3D 视觉理解、物理世界交互推理、虚拟 - 现实融合建模。
理论基础