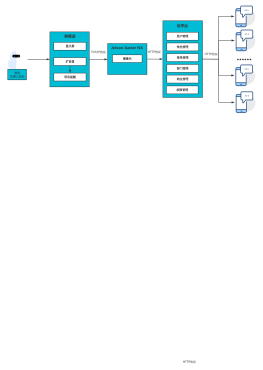
机器人连接图
2016-08-22 14:15:57 0 举报机器人连接图是一种图形化的展示方式,用于表示机器人与周围环境或其他机器人之间的交互关系。在图中,每个机器人节点通过边与其他节点相连,边的粗细和颜色可以表示不同的信息,如通信带宽、距离等。通过观察连接图,我们可以了解机器人之间的协作关系、信息传递路径以及网络拓扑结构等信息。此外,连接图还可以用于分析和优化机器人群体的行为,例如避免死锁、提高通信效率等。总之,机器人连接图为研究和应用机器人技术提供了一个直观且有用的工具。
模板推荐
作者其他创作
大纲/内容



0 条评论
下一页