缓冲队列
BASE64编码数据上传
数据处理层
注册回调、注销回调
手机
内核态|用户态建立连接 数据交换
启动link_start.pyPID:P0
Cb
用户接口按钮
模数转换器输入:模拟图像输出:数字图像
图像处理进程fork PID:P4
内网上的WEB SERVER负责关机重启等
C/C++ 程序
图像处理逻辑
canvas 绘制
公网服务器
IPC IP1
CMOS采集模拟信号
请求关机
宏块
内网服务器
C++转换numpy编码
封装类-CHKIPCamera
- char *m_ip- int m_port- char *m_username- char *m_password- long m_lRealPlayHandle- long m_lUserID- uint8_t *buffer- AVCodeContext *c- AVPacket *pkt- struct SwsContext *img_convert_ctx- const AVCodec *codec- Mat cvImg- AVFrame *pYUVFrame- AVFrame *pRGBFrame
+ start():bool+ stop():bool+ current():Mat+ HKIPCamera(...)+ friend &operator<<(...)+ friend void raalDataCallBack(...)# initFFMPEG():bool# login():bool# logout():bool# open():bool# close():bool~ HKIPCamera *HKIPCamera_init(...)~ int HKIPCamera_start()~ int HKIPCamera_stop()~ void HKIPCamera_frame(...)
服务端SOCKET.IO数据接口
感知层
数字图像
网页端SOCKET.IO数据接口
IPC IP2
base64解码Blob转换
Internet
ip
domURL转换canvas绘制
NALU头
server
Py_v3序列化与反序列化接口
Mat缓冲区内存拷贝
应用层输出处理后的报警数据
TCP-socket服务器推送base64编码后的的图像
IP CameraPython Interface1920*1080*3 frame data
python脚本定时拷贝
宏块数据
V3接口数据传递方式序列化与反序列化耗时较多
base64编码图像并上传
flask网页服务
转发关机请求
一帧数字图像
报警?
视频流
QP
上传逻辑判断
Image URL
Cr
修改current_ip
回调解码
图像处理进程fork PID:P3
LOG数据
sensor
初始化内存传递指针
缓冲区
socketcallback
封装
公网上的WEB SERVER提供LOG文件下载
P
Traffic
未解码的视频帧
输出优先级1、报警图像2、用户点击按钮
数据处理驱动
切片数据
帧回调
修改current_ip为当前进程绑定的IP
输入
已解码MAT缓冲区
socket
Memcached
公网上的WEB SERVER接收手机请求
domURL
C、Python 程序
Ctypes转换器图像处理逻辑
切片B
IPCamera
图像采集、视频编码RTSP推流
切片头
服务层HTTP数据接口
输出显示给用户
Python/C/C++ 程序
RTSP解码图像处理逻辑
宏块类型
...
Y
gnome tabIP4
切片A
Mat*指针直接传递
2、或直接下载LOG文件
V1、V2接口直接解析从相机推出的RTSP流
data
SDK外部开发接口
N
内网上的WEB SERVER提供LOG文件下载
图像处理
C++ Runtime Lib V3
MAT缓冲区数据驱动层接口
flask serverPID:P0父进程
编码后的H.264原始码流
视频解码模块FFMPEG
取帧模块
高性能内存缓存中间件
JS-Blobbase64解码
图像处理进程fork PID:P1
Python帧数据接口
V4接口数据传递方式改为跨解释器内存拷贝为了提高封装性将C和Python接口统一
C、Py_v4指针内存拷贝接口
输入正常数据
gnome tabIP3
IPCamera是属于感知层的传感器 用于采集真实世界的图像最终将采集到的图像转码为可供网络传输的视频流
IPC 感知层硬件
C++ 程序
打开回调、关闭回调
图像处理进程fork PID:P2
交互
交互模块是数据驱动层中与SDK沟通的桥梁 数据驱动层最终对外提供取帧模块下的接口 其余部分都被严格封装由于摄像头转码的数字图像格式为国际标准YUV 为了在图像处理程序中进行处理需要进行YUV->BGR的颜色空间转换
数据驱动层实现与封装
1个切片
关机请求
视频编码器芯片输入:数字图像序列输出:编码后的视频
gnome tabIP1
Mat-ndArrayndArray序列化
rawbase64
输入报警数据
H.264编码
真实世界图像
IPC IP3
TCP-socket客户端推送current_ip变更请求
Blob Image
切片C
ndarray frame data
HTTP-POST本地回环127.0.0.1
或直接下载LOG文件
预测类型
gnome tabIP2
blobimage
Python 解释器
ndArray反序列化图像处理逻辑
IPC IP4
IPC内部系统调用
maingnome-terminal
1、python脚本定时拷贝
HTTP-POST数据接口
登录、登出
数据服务层
颜色空间转换模块SWS YUV->BGR
socket.io接口
WEB PAGE
Image
C++ Runtime Lib V4
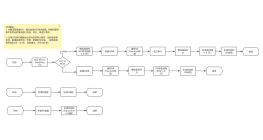
本框架兼容多个摄像头本流程图以4个IPC为例红框内为近期改进部分
CPB
当前进程绑定的IP==current_ip?
key-value数据current_ip
memcachedTCP server
开发人员通过SDK可以修改IPC参数或调用IPC预留的一些功能SDK通过IPC内部系统调用来完成必要的功能
IPC 感知层软件
C++直传接口