是
2号托盘
小机器人上下爪
一号组盘收尾
ScanSet[0] = 0;
getRpjScanFrontSide = false;
WriteD(\"7100\
\"设备不在自动运行状态\"
\"拉带电芯扫码失败\",WriteD(\"7109\
不成功
点击运行
软件加载
二层取盘位允许RGV小车取盘
一键换型
取盘
报警管理
LiveDB线程
signalPLC.RpjScanTrayK>0,RpjScanTrayK从csPLCOmron.ReadD(\"7000\
WriteD(\"7112\
一层放
大机器人左右上爪(右爪翻转位取料)
满盘出扫码
update
上料机
LiveRPJ线程
signalPLC.RpjScanBatt > 0,RpjScanBatt从csPLCOmron.ReadD(\"7000\
来料拍照NG
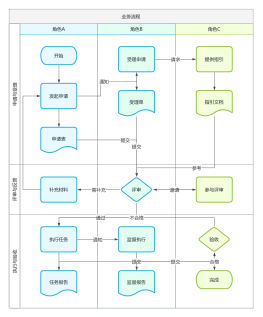
需求人员
WriteD(\"7021\
ACT流程图
自检成功
取完盘
大机器人左右下爪
PLC连接异常,重连
检查是否换型
否
\"机器人电芯扫码失败\",WriteD(\"7109\
翻转机构翻转
数据库
空盘扫码
RpjScanTrayK == 102 && tbTray1.Text == \"\"
连接报错
sys_live_table
一层放盘位RGV放盘完成时转向问题
托盘号是否为空
空盘扫码时清除本地数据
Main线程
一层放盘位允许RGV小车放盘
获取电芯条码
二层取盘位请求出盘时去向不合法
signalPLC.RpjOutTray == 2
WriteD(\"7110\
电芯条码为空
检查MES
signalPLC.RpjPhotographNG = true,RpjPhotographNG从csPLCOmron.ReadD(\"7000\
RpjScanTrayK == 101 && tbTray1.Text == \"\"
一层放盘位机器请求放盘
查询
signalPLC.RpjOutTray == 1
电芯扫码
二层取盘位机器请求取盘
设备是否在自动运行状态
对侧取
电芯扫码枪连接、电芯机器人扫码枪连接、入盘位托盘扫码枪、出盘位扫码枪、PLC连接
ScanStep == 0
检查与PLC连接是否正常
csPLCOmron
checkself线程开启
四工位旋转
添加生产记录
二层取
while循环
放盘
下料机
同侧取
二号组盘收尾
\"下层空盘扫码失败,请手动输入\",WriteD(\"7106\
点击自检
sys_floor_table2
RpjScanBatt == 1
流程走完WriteD(\"7105\
放完盘