05_软件体系
2025-10-14 23:03:03 0 举报AI智能生成
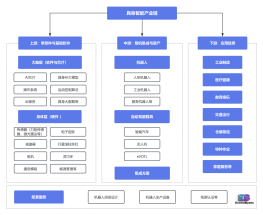
该文档“05_软件体系”是一份全面阐述特定软件体系结构的正式文件。该文件提供了关于系统设计的核心内容,详细解释了软件各组件间的交互,以及它们如何协同工作以支持整体功能和目标。 核心内容涵盖了诸如模块化、层次划分和接口标准化等方面,强调了软件体系设计的理论基础。本文还深入讨论了数据流和控制流的优化,旨在确保软件高效运行并易于扩展和维护。 此外,文件以详尽的技术描述和视觉模型图表装饰,使用具体的修饰语,如“高效”,“模块化”和“灵活”,增强了文档中提出的软件设计理念和目标的清晰度。 总之,“05_软件体系”是一份旨在向工程师和设计师们提供设计智能、可扩展和高性能软件系统的具体指南的详细描述文档,不仅具有战略层面的指导意义,也提供了细节和实用的技术建议。
模板推荐
作者其他创作
大纲/内容








0 条评论
下一页

