16_具身机器人_Slam建图并导航
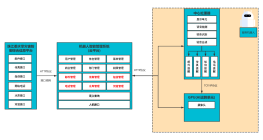
2025-10-21 22:33:52 0 举报本文档详细介绍了具身机器人通过SLAM技术进行建图并实现导航的过程。SLAM(Simultaneous Localization and Mapping,即同时定位与地图构建)是自动化设备在未知环境中进行自主导航的关键技术之一。文档首先阐述了具身机器人(或者称之为“移动机器人”、“机器人自主系统”)在环境感知、数据处理及行为决策方面的基本架构。然后,详细讲述了机器人如何实时收集来自不同传感器(如激光雷达、摄像头、IMU等)的数据,如何将这些数据融合处理,以实现机器人自身的精确定位及其周围环境的实时地图构建。重点说明了在空间复杂性和动态变化的情况下,如何有效提升SLAM算法的稳定性和精度。文件结尾还强调了建图与导航的无缝结合,为机器人提供了高效、精确且自适应的路径规划能力,使之能在多样化的真实世界环境中可靠地导航。该文档作为一种理论框架和技术指导,将极大地促进具身机器人自主导航技术的发展。
模板推荐
作者其他创作
大纲/内容








0 条评论
下一页