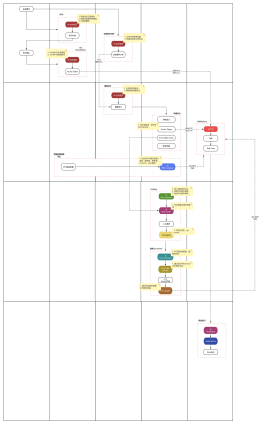
底盘运动控制
建立与OneNET云平台MQTT连接
Y
使用cv2.imshow 进行可视化显示
初始化人体跟随节点
N
麦克风阵列
是否为人体跟随
是否收到控制指令
初始化路径规划节点
是否为语音控制
是否为控制指令
开始
监听摄像头图像数据
发布识别结果话题
监听控制指令
发布高精度地图数据
监听麦克风输入
语音合成
发布控制指令
加载MediaPipe Face Detection 轻量级深度学习检测器
是否为语音交互
网页客户端
是否收到音频数据
用户语音指令
输出运动控制指令
构建二维栅格地图
控制层
调用SSDLite-MobileNet V2 轻量化模型执行前向推理
加载TensorFlow Lite 推理框架与 OpenCV 计算机视觉库
返回
语音识别
发布人体检测信息
是否收到激光数据
反馈执行结果
监听激光雷达点云数据
是否为对话信息
HTTP协议通信指令传输
是否收到激光雷达数据
界面层
语义理解
Web前端网页
生成音频播报输出
初始化物体识别节点
监听云平台消息并持续通信
采集环境数据上报云平台
进行双层路径规划
树莓派服务端
运动控制
调用模型前向推理获取人体边界框的归一化坐标
调用move_and_stop执行指令
初始化语音交互节点
视觉识别
是否接收到摄像头图像帧
发布回复文本
建立云平台MQTT连接
上位机控制节点初始化
是否连接成功
发布运动控制指令
音频数据处理与语义理解
上电初始化系统
可视化操作界面运动控制按钮
远程指令解析
通信层
匹配点云数据与地图进行定位
指令校验是否通过
WIFI连接设备热点
初始化建图节点