步骤S31A,所述图像处理模块根据所述当前位姿构建以所述图像采集单元为原心的空间直角坐标系,并确定所述图像采集单元在所述空间直角坐标系下的空间转动角度
N
步骤S31C,所述图像处理模块生成一预设虚拟画面并显示在所述镜片上
步骤S32C
步骤S31A
1
步骤S32C,所述图像处理模块计算所述预设虚拟画面的曲面边缘与所述用户之间的位置差值
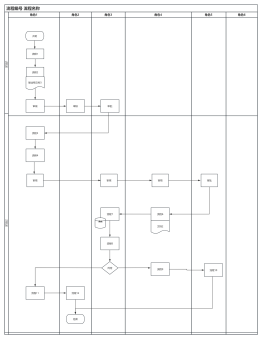
步骤S3,移动所述三维MIMO信道模型中所述用户的当前位置
转至所述步骤S2
步骤S32A
步骤S33A,根据所述空间转动角度和所述夹角生成所述虚拟角度信息
步骤S4,根据移动后的所述当前位置,更新所述空间相关性系数
步骤S2
步骤S32B
步骤S33C
步骤S12,所述图像采集单元提取所述实时图像中的特征点并分析所述特征点对应的区域是否满足视角需求
步骤S1,根据基站和用户的当前位置和数量,构建三维MIMO信道模型
步骤S3
步骤S32A,获取所述图像采集单元与所述用户之间的夹角
步骤S33C,所述图像处理模块根据所述位置差值确定所述虚拟视场角信息
步骤S13,所述图像采集单元采集得到所述实时图像
步骤S11
步骤S12
步骤S33A
步骤S13
步骤S32B,所述图像处理模块根据所述用户的瞳距对所述第一位置信息调节,生成第二位置信息,并将所述第二位置信息作为所述虚拟位置信息输出
步骤S31B,所述图像处理模块根据所述当前位姿构建以所述图像采集单元为原心的空间直角坐标系,并选取所述用户的眉心作为预设参考点,根据所述图像采集单元与所述预设参考点之间的偏移量,生成第一位置信息
步骤S2,根据所述三维MIMO信道模型,获取空间相关性系数
步骤S11,所述图像采集单元通过采集一包括多个特征点的特征点区域得到所述实时图像
步骤S31C
步骤S31B
步骤S4
Y
步骤S1