AI
推荐
模板社区
专题
登录
免费注册
首页
流程图
详情
平衡小车程序流程图
2021-02-22 13:45:30
77
举报
分享方式
使用 (¥3)
平衡小车程序流程图,包括PID算法,过度倾斜检测,超声波测距
程序原理图
模板推荐
作者其他创作
大纲/内容
小车平衡角度设置为0°
读取陀螺仪数据gyro获取加速度计数据acc超声波模块测距数据dis
dis<安全值
Y
设置PWM占空比为0
N
延时一个PID周期T
根据PID算法设置PWM占空比
小车平衡角度设置为10°
gyro>45°或gyro<-45°
串行PID计算PWM占空比
输出PWM
开始
acc>设定值
程序初始化
收藏
立即使用
平衡小车程序流程图
收藏
立即使用
单片机控制姿态传感器模块的程序流程图
收藏
立即使用
单片机控制TB6612的程序流程图
收藏
立即使用
单片机控制超声波模块的程序流程图
PO_e6a1e7
职业:本科生在读
去主页
Collect
Get Started
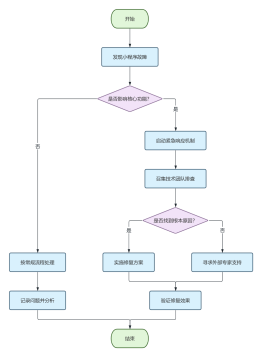
小程序故障处理流程
Collect
Get Started
程序流程图
Collect
Get Started
环形流程图
Collect
Get Started
程序流程图
评论
0
条评论
下一页
Document