AI
推荐
模板社区
专题
登录
免费注册
首页
流程图
详情
整体视觉SLAM流程图
2020-11-25 13:47:01
1
举报
分享方式
使用 (¥5)
整体视觉SLAM
SLAM
流程图
框架图
模板推荐
作者其他创作
大纲/内容
feedback and verification
MAP estimate
传感器数据(sensor data)
nonlinear optimization
feature extraction
后端(back end)
data association:--short term(fearture tracking)
前端(front end)视觉惯性里程计
图3-1.1 整体视觉SALM流程图
回环检测(loop Closing)
建图(SLAM estimate)
收藏
立即使用
整体视觉SLAM流程图
181804_PO
职业:暂无
去主页
Collect
Get Started
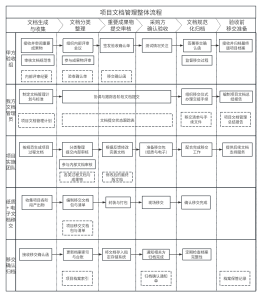
流程图-项目文档管理整体流程图
Collect
Get Started
视觉传播
Collect
Get Started
整体流程图
Collect
Get Started
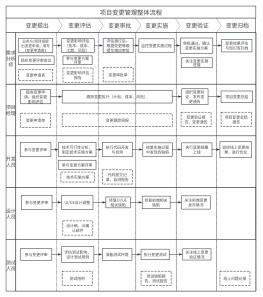
流程图-项目变更管理整体流程图
评论
0
条评论
下一页
Document