AI
推荐
模板社区
专题
登录
免费注册
首页
流程图
详情
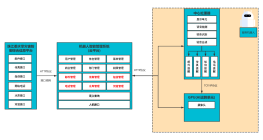
2.0协议机器人绕障临时解决方案泳道图
2021-10-12 14:35:55
28
举报
分享方式
免费使用
2.0机器人绕障临时解决方案逻辑
系统架构
模板推荐
作者其他创作
大纲/内容
拉取
路径(重)规划
上报
操作台发起去某处指令
机器人停止任务状态:失败
此请求要做成异步拉取
结束
Robot
判断障碍物附近是否为终点
否
计算机器人周围矩阵与障碍物面积
计算
下发
机器人移动到目标点位任务状态:成功
执行指令
发起拉取激光点位请求
机器人扫描激光点位
返回
下发路径
修改任务状态任务结束
是
判断路径堵死
下发指令:去某处
RMS
执行模糊停逻辑
收藏
立即使用
机器人排队,模糊停车流程图
收藏
立即使用
2.0协议数据流转图
收藏
立即使用
2.0协议机器人绕障临时解决方案泳道图
康巴汉子村
职业:暂无
去主页
Collect
Get Started
珠江委机器人架构
Collect
Get Started
品类解决方案
Collect
Get Started
急救机器人
Collect
Get Started
解决方案
评论
0
条评论
下一页
Document