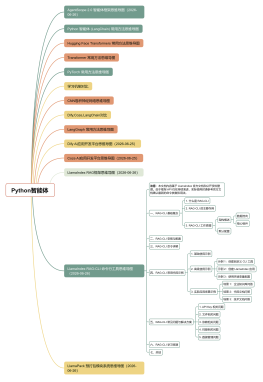
x加速度
朝向角
航迹滤波
CTmodel
y加速度
1×3 double
1×1 double
1×frame
y速度
func_TrackManage.m
(npoints 为目标点数)
目标状态
func_S.m
帧1
. . .
3×1 cell
N×6 矩阵
航迹管理
点迹N
Track_all_sum
.mat数据
画图与输出信息
起始帧数
帧frame
指标计算
func_EKF.mfunc_IMM.m
CA
func_TrackAssociation.m
各模型状态
目标n
track_id
start_frame
end_frame
state
Pstate
nstate
Pnstate
modelprob
score
S_score
...
目标点迹预处理
CV
IMMmodel
保留得分(航迹号)
协方差矩阵
CVmodel
数据命名
数据结构
Data_Cartesian
4×npoints
Data_Cartesian_mean
4×1
Data_Polar
3×npoints
Data_Polar_mean
3×1
Amp
1×1
IMM
func_TempTrackProcess.m
func_accumulation.m
func_DBSCAN.m
1×6 向量
目标1
帧2
模型概率矩阵
7×n double
跟踪得分
1×当前帧目标个数
结束帧数
1×n struct(n为目标个数)
1×frame元胞
目标2
CT
是不是要加cell之类的结构类型?,如3×1 cell
func_data_trans.m
x距离
目标m
7×7 double
y距离
4×1 cell
感觉这里一列n*n有点多,显得有点乱,感觉可以直接滚蛋,像右边这样;还有右下角那个7×1不知道是不是cell,我乱加的,包括右边的4×1cell
点迹2
CAmodel
func_StableTrackProcess.m
func_rmse.m
frame×4 struct
1×最大航迹数目
雷达点迹数据输入
8×1 cell
点迹1
x速度
Data_target
航迹得分
Track_all
DBSCAN聚类